3-4. Cпособы улучшения характеристик оборудования.
3-4. Cпособы улучшения характеристик оборудования. |
В современных радиорелейных системах связи существует несколько специфических устройств, методов и структур для улучшения характеристик оборудования.
Согласно материалам, рассмотренным в главе 2-4, в большинстве видов цифровой фазовой модуляции меняется амплитуда модулированного сигнала. Исключение составляют сигналы двухпозиционной модуляции с непрерывной фазой и сигналы квадратурной модуляции, полученные при помощи сигнальных процессоров по программам. В модуляции QPSK, полученной типовыми схемотехническими способами наблюдаются провалы по амплитуде до нуля, а в OQPSK провалы по амплитуде достигают 30%. Для неискаженной передачи таких сигналов приемо-передающий тракт должен иметь линейную амплитудную характеристику. В противном случае форма огибающей символов искажается, что приводит к расширению занимаемого спектра частот. Это обстоятельство иллюстрируется рис. 3-4-1. Согласно положениям, рассмотренным ранее, наиболее экономична по спектру форма символа, приближенная к виду приподнятого косинуса. Полоса частот, занимаемая символом, обратно пропорциональна длительности фронта. При искажении амплитудной характеристики форма символа искажается, длительность его фронта уменьшается и, значит, полоса частот расширяется.
Рис. 3-4-1
В многопозиционной модуляции типа N-QAM, в которой изменения амплитуды заложены в принцип модуляции, требования на линейность амплитудной характеристики трактов еще жестче, поскольку здесь, помимо расширения спектра сигналов, наблюдаются и искажения фазовых сдвигов (рис. 3-4-2).
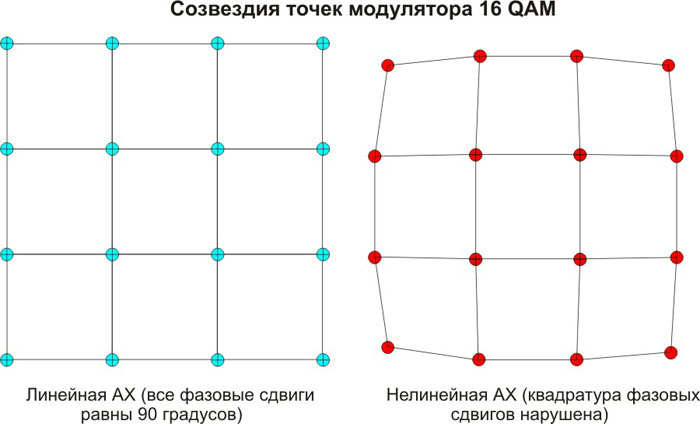
Рис. 3-4-2
Искажения фазовых сдвигов приводят к уменьшению расстояний между некоторыми точками созвездия точек в многоуровневой модуляции, а значит, к увеличению количества ошибок. Нелинейности в тракте оказывают сильное влияние в тех узлах, в которых проходят сигналы с наибольшими уровнями. Безусловно, такими узлами являются усилители мощности передающих устройств.
| Проведите исследование влияния нелинейности амплитудной характеристики усилителя мощности передатчика а модулированный многопозиционный сигнал. При возможности использования программного пакета MatLab, запустите программу amp_qpsk.mdl, находящуюся в папке "Программы" присланных Вам материалов. В противном случае можно провести анализ при помощи Flash-ролика (NelAmp.swf). |
Для получения линейной амплитудной характеристики усилителей мощности имеется два основных метода. Один заключается в использовании начального участка амплитудной характеристики усилителя. Для этого применяется усилитель с мощностью в несколько раз превышающую номинальное значение. К примеру, японская фирма NEC, в своих первых разработках цифрового магистрального оборудования, применяла для передатчика с выходной мощностью в один ватт лампу бегущей волны с мощностью в двести ватт. В современном оборудовании разница между номинальным значением мощности и мощность. насыщения значительно меньше, но для получения высокой линейности применяются специальные устройства - линеаризаторы (LNZ).
 \
\
Рис. 3-4-3
Основная идея линеаризатора заключается в том, чтобы заранее исказить сигнал таким образом, чтобы скомпенсировать продукты искажения после усиления. Дело в том, что при искажении амплитудной характеристики усилителя мощности возникают нечетные гармоники. Наибольший уровень имеют продукты искажений по третьей гармонике. Эти искажения и подлежат компенсации. На рис. 3-4-3 показана векторная диаграмма полезного основного сигнала и сигнала третьей гармоники на выходе усилителя СВЧ. Видно, что вектор искажений опережает по фазе вектор основного сигнала и имеет меньшую амплитуду. Сигнал, поступающий на линеаризатор искажается нелинейным элементом, продукты искажений проходят через фазовращатель, сдвигаются на 180 градусов и подаются на вход усилителя. Усилитель создает собственные искажения, которые взаимодействуют с искажениями линеаризатора. Подбирая амплитуду и фазу искажений линеаризатора по третьей гармонике можно добиться компенсации нелинейностей.
Линеаризаторы могут быть установлены непосредственно перед усилителем СВЧ передатчика или в тракте промежуточной частоты.
Рис. 3-4-4
Структурная схема линеаризатора показана на рис. 3-4-4. Схема состоит из управляемых элементов - исказителя (И), фазовращателя (ФВ) и аттенюатора (Атт). Пример структурной схемы линеаризатора, включаемого в тракт промежуточной частоты и обладающего широкими возможностями, изображен на рис. 3-5-5.
Рис. 3-4-5
Многие типы современного оборудования радиорелейной связи могут работать в режиме адаптивной регулировки мощности передатчика (АРМП). В этом режиме система следит за уровнем сигнала на входе приемника и, если уровень становиться меньше установленного порога АРМП, передает по обратному каналу связи сигнал управления мощностью соответствующего передатчика (рис.3-4-6). Уровень сигнала на входе приемника измеряется косвенным методом по напряжению, вырабатываемому системой автоматической регулировки усиления (АРУ) в усилителе промежуточной частоты.
Рис. 3-4-6
В приемнике обратного направления сигналы АРМП выделяются и преобразуются в напряжение цифроаналоговым преобразователем (ЦАП) и, затем, управляют уровнем мощности передатчика. Следовательно, алгоритм работы системы АРМП следующий. При нормальных условиях распространения радиосигнала передатчики работают с номинальной мощностью. При ухудшении прохождения сигнала мощности передатчиков увеличиваются вплоть до максимального значения (соответствующие графики показаны в нижней части рис. 3-4-6). При правильно рассчитанной системе связи большую часть времени работы оборудование работает на пониженной мощности. Это обеспечивает работу передатчиков в линейном режиме и улучшает электромагнитную обстановку в следствии уменьшения внутрисистемных помех.
Несмотря на очевидные преимущества, системе АРМП присущи и определенные недостатки. Прежде всего, при резких изменениях погодных условий вся структура может войти в режим генерации, поскольку она является системой автоматизированного управления с очень инерционной обратной связью. В некоторых типах радиорелейного оборудования имеются специальные следящие средства, отключающие АРМП при возникновении генерации. При отсутствии этих средств за работой АРМП приходится следить обслуживающему персоналу.
Важным элементом, позволяющим улучшить работу цифровых радиорелейных систем связи, являются адаптивные эквалайзеры. Одним из факторов, приводящим к ошибкам при передаче сигналов, являются дисперсионные искажения цифровых символов. Дисперсионные искажения - это растягивание длительности символов за пределы тактовых интервалов. Основная причина связана с нелинейностью фазочастотных характеристик тракта. В системах связи чаще принято пользоваться характеристикой группового времени запаздывания, которая является первой производной от фазочастотной характеристики. Иначе, это зависимость крутизны фазочастотной характеристики от частоты или зависимость времени прохождения сигнала через систему связи от частоты. Связь между фазочастотной характеристикой и характеристикой группового времени запаздывания (ГВЗ) показана на рис. 3-4-7.
Рис. 3-4-7
Физический смысл характеристики ГВЗ очень простой - она показывает, сколько времени необходимо для прохождения сигнала на данной частоте через какое-либо устройство. При неравномерной характеристике ГВЗ различные спектральные составляющие цифровых символов проходят через элементы системы связи за разное время. Это и приводит к растягиванию символов, а значит, к влиянию символов друг не друга, иначе, к межсимвольной интерференции.
Для повышения равномерности характеристики ГВЗ элементов радиорелейного оборудования применяются специальные фазокорректирующие цепи (корректоры времени запаздывания), вносящие искажения ГВЗ противоположного знака. Принцип работы фазовых корректоров поясняется рис. 3-4-8.
Рис. 3-4-8
Фазокорректирующие цепи могут обеспечить достаточно равномерные характеристики ГВЗ приемопередающего оборудования и антенно-фидерных трактов. Однако, тракты распространения радиоволн вносят дисперсионные искажения случайного характера, которые нельзя скомпенсировать фазовыми корректорами с постоянными параметрами. В первых разработках цифрового радиорелейного оборудования для борьбы с межсимвольной интерференцией предполагалось использовать регенерацию цифровых сигналов, т.е. на периодическое восстановление исходной формы символов на пути прохождения сигналов. Но протяженность линий связи при регенерации ограничивается накоплением фазовых дрожаний символов (джиттера), которые сопровождают процессы регенерации. Поэтому, в современных цифровых радиорелейных системах регенераторы почти не применяются. Альтернативой являются адаптивные эквалайзеры (корректоры) которые восстанавливают форму символов на мере их искажений.
Основная причина межсимвольной интерференции, источником которой являются тракты распространения радиоволн, это частотно-селективные замирания сигнала. Принято различать два основных вида замираний - гладкие замирания и частотно-селективные. При гладких замираниях происходит равномерное ослабление сигналов всех частот в полосе пропускания оборудования (рис. 3-4-9).
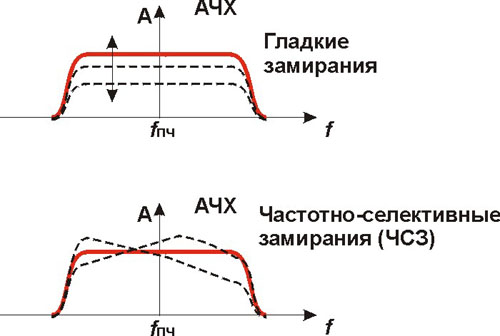
Рис. 3-4-9
При частотно-селективных замираниях происходит разное ослабление сигналов на разных частотах. Как правило, частотно-селективные замирания учитываются при полосе пропускания оборудования выше 10 МГц. Как видно из рис. 3-4-9, эти замирания приводят к случайному изменению амплитудно-частотной характеристики тракта , что, в свою очередь, к случайному изменению формы символов и к межсимвольной интерференции. Для борьбы с этими явлениями применяются адаптивные эквалайзеры в частотной или во временной областях.
Рис. 3-4-10
Основным элементом эквалайзера в частотной области является управляемый фильтр промежуточной частоты (УФПЧ) как показано на рис. 3-4-10. Управление фильтром осуществляется по двум каналам - канал симметричных искажений и канал перекоса характеристики АЧХ фильтра. Пример семейства регулировочных характеристик для одного из типов аппаратуры магистральной цифровой радиорелейной связи фирмы NEC показан на рис. 3-4-10. Суть метода коррекции заключается в том, что проводится анализ уровней сигналов на разных частотах в пределах полосы пропускания оборудования (в схеме, показанной на рис. 3-4-10 анализ проводится на частотах f0, f1 и f2). Для этого сигналы отфильтровываются соответствующими фильтрами, детектируются в амплитудных детекторах (АД) и подаются на устройство управления фильтром ПЧ. При возникновении частотно-селективных замираний эквалайзер формирует компенсирующие искажения АЧХ с противоположным знаком.
Адаптивные эквалайзеры во временной области распространены в настоящее время более широко. Чаще всего такие эквалайзеры строятся на основе трансверсальных фильтров. Одна из возможных схем эквалайзера показана на рис. 3-4-11. Она представляет собой цепочку каскадов задержки на величину тактового интервала цифрового сигнала (Т). Сигналы со входов и выходов каскадов задержки перемножаются и поступают на выход эквалайзера. Для компенсации искажений формы символов уровни перемножаемых сигналов регулируются в соответствии с весовыми коэффициентами.
Рис 3-4-11
Принцип работы эквалайзера заключается в том, что каждый символ, искаженный за счет частотно-селективных замираний корректируется соседними импульсами. На рис. 3-4-11-б показано как происходит коррекция одного из фронтов символа. Для этого, берется соседний импульс, сдвигается линией задержки на величину Т, инвертируется и уменьшается по амплитуде. Коррекция фронта происходит за счет сложения корректируемого символа и корректирующего. Причем подбирается амплитуда корректирующего сигнала таким образом, чтобы получить нулевое напряжение суммарного сигнала в тактовой точке. Этот процесс носит название "коррекция по нулям". Другой фронт символа корректируется подобным же образом, только для коррекции берется импульс или импульсы, расположенные с другой стороны от корректируемого символа. Как правило, в современной аппаратуре могут применяться адаптивные эквалайзеры, состоящие из 17 или 19 звеньев, и для каждого символа формируется корректирующий сигнал, полученный усреднением формы 16 или 18 соседних символов. Иногда применяется более сложный двухэтапный алгоритм коррекции, при котором вначале происходит коррекция "по нулям ", а затем - по минимуму взаимных влияний символов.
В начальных разработках оборудования цифровой радиорелейной связи адаптивные эквалайзеры имели очень высокую стоимость, сравнимую со стоимостью самого оборудования, но в настоящее время разработаны дешевые БИС, выполняющие все корректирующие функции. Поэтому область применения эквалайзеров существенно расширилась. Помимо борьбы с частотно-селективными замираниями, адаптивные эквалайзеры начали применяться для компенсации взаимных искажений в различных узлах оборудования. В частности, они могут использоваться для компенсации перекрестного влияния синфазного и квадратурного каналов в модулированных многоуровневых сигналах при демодуляции (рис. 3-4-12).
Рис. 3-4-12
Другая область применения адаптивных эквалайзеров - организация систем связи при использовании со-канальных частотных планов. К примеру, в оборудовании Pasolink NEO (рис. 3-4-13) функционируют два ствола, каждый со скоростью 155 Мбит/с, использующие одинаковые частоты, но с разной поляризацией. При распространении радиосигнала по радиорелейным интервалам могут наблюдаться случайные колебания плоскостей поляризации. При этом возникают кросс-поляризационные влияния между стволами и обеспечение нормальной работы в этих условиях возможно только при компенсации этих влияний.
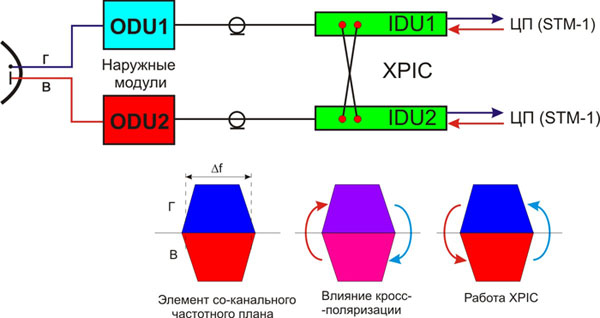
Рис. 3-4-13
Компенсаторы кросс-поляризационных искажений (XPIC) выполняются на основе четырех адаптивных эквалайзеров. включенных по схеме, аналогичной показанной на рис. 3-4-12.
Эффективным методом борьбы с интерференционными замираниями является применение разнесенного приема. Существует несколько методов разнесенного приема: частотно-разнесенный прием, пространственно-разнесенный прием, территориально-разнесенный прием и пр. Наибольшее применение в цифровых радиорелейных системах связи нашел метод пространственно-разнесенного приема. Физическая основа метода заключается в том, что в разных точках пространства, разнесенных на достаточное расстояние интерференционные замирания независимы друг от друга. Практически для защиты от интерференционных замираний применяются две антенны и два комплекта оборудования, разнесенных по высоте антенной опоры на расстояние не менее 150 длин волн. Точные значения величины разноса для конкретного профиля интервала РРС можно определить по формулам 9.159 и 9.160 [1]. Структурная схема пространственно-разнесенного приема представлена на рис. 3-4-14.
Рис. 3-4-14
Для осуществления разнесенного приема необходимо выполнить два условия:
Выполнение первого условия обеспечивается разносом антенн, а выполнения для второго условия необходимо обеспечить одинаковое время прохождения образцов сигналов до устройств сложения. Одним из методов для достижения этого может быть применение линии задержки (DADE), в качестве которого может быть использован отрезок коаксиального кабеля. (обычно время задержки сигнала в кабеле составляет примерно 5 нс/м ).
Алгоритм работы устройства сложения должен обеспечивать линейное сложение, если отношения сигнал-шум в образцах сигналов примерно одинаковы и выбирать наилучший сигнал (режим "автовыбор"), при разных отношениях сигнал-шум. Такой алгоритм называется оптимальное сложение. Необходимо отметить, что режим "автовыбор" в цифровой связи возможен при организации "безобрывного переключения". Для этого цифровые потоки в образцах сигнала должны быть засинхронизированы от общего источника!
В настоящее время системы разнесенного приема получают дополнительное развитие в виде структуры MIMO (множествкнный вход-множественный выход). Достаточно широко эти методы используются в системах распределения цифровой информации. Принцип системы MIMO поясняется рис. 3-4-15.
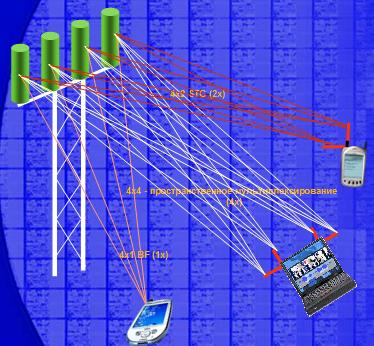
Рис 3-4-15
В данных структурах прием и передача сигналов осуществляется по многим путям с последующей компьютерной обработкой информации с целью оптимального выделения полезной информации.